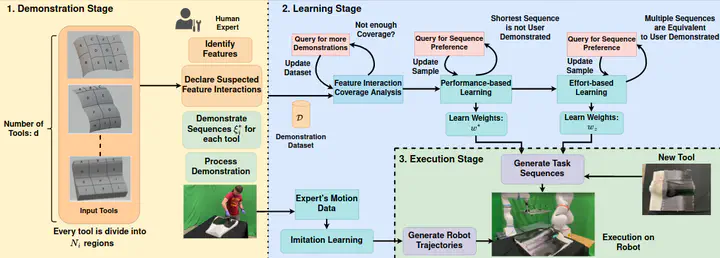
 Process flow showcasing the framework to learn expert’s policy
Process flow showcasing the framework to learn expert’s policyOmey Mohan Manyar
Ph.D. Student in Robotics
Interested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.
Process flow showcasing the framework to learn expert’s policyInterested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.