Omey Mohan Manyar
Omey Mohan Manyar
Home
Research
Publications
Projects
Experience
Accomplishments
CV
1
Real-to-Sim Parameter Learning for Deformable Packages Using High-Fidelity Simulators for Robotic Manipulation
Deformable packages are becoming increasingly prevalent in the logistics and warehouse industry, demanding robotic manipulation …
Omey Mohan Manyar
,
Hantao Ye
,
Siddharth Mayya
,
Fan Wang
,
Satyandra K. Gupta
PDF
Cite
Code
Project
Synthetic image-assisted deep learning framework for detecting defects during composite sheet layup
Automation of high-performance manufacturing processes such as prepreg composite layup has been gaining a lot of interest lately. …
Omey Mohan Manyar
,
Junyan Cheng
,
Reuben Levine
,
Vihan Krishnan
,
Jernej Barbic and Satyandra K. Gupta
PDF
Cite
Code
Dataset
A Digital Twin for Automated Layup of Prepreg Composite Sheets
The composite sheet layup process involves stacking several layers of a viscoelastic prepreg sheet and curing the laminate to …
Yi-Wei Chen
,
Rex J. Joseph
,
Alec Kanyuck
,
Shahwaz Khan
,
Rishi K. Malhan
,
Omey Mohan Manyar
,
Zachary McNulty
,
Bohan Wang
,
Jernej Barbic
,
Satyandra K.Gupta
PDF
Cite
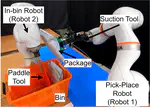
Simulation-Assisted Learning for Efficient Bin-Packing of Deformable Packages in a Bimanual Robotic Cell
Bin-packing is an important problem in the robotic warehouse domain. Traditionally, this problem has been studied only for rigid …
Omey Mohan Manyar
,
Hantao Ye
,
Meghana Sagare
,
Siddharth Mayya
,
Fan Wang
,
Satyandra K.Gupta
PDF
Cite
Physics-Informed Learning to Enable Robotic Screw-Driving Under Hole Pose Uncertainties
Screw-driving is an important operation in numerous applications. In many situations, hole pose cannot be estimated very accurately. …
Omey Mohan Manyar
,
Santosh V. Narayanan
,
Rohin Lengade
,
Satyandra K.Gupta
PDF
Cite
Inverse Reinforcement Learning Framework for Transferring Task Sequencing Policies from Humans to Robots in Manufacturing Applications
In this work, we present an inverse reinforcement learning approach for solving the problem of task sequencing for robots in complex …
Omey Mohan Manyar
,
Zachary McNulty
,
Stefanos Nikolaidis
,
Satyandra K.Gupta
PDF
Cite
Code
Visual servo-based trajectory planning for fast and accurate sheet pick and place operations
In industry, several operations require sheet-like materials to be transported from a loading station to the desired location. Such …
Omey Mohan Manyar
,
Bharat Deshkulkarni
,
Alec Kanyuck
,
and Satyandra K.Gupta
PDF
Cite
DOI
A Simulation-Based Grasp Planner for Enabling Robotic Grasping during Composite Sheet Layup
Composites are increasingly becoming a material of choice in the aerospace and automotive industries. Currently, many composite parts …
Omey Mohan Manyar
,
Jaineel Desai
,
Nimish Deogaonkar
,
Rex Jomy Joseph
,
Rishi K. Malhan
,
Zachary McNulty
,
Bohan Wang
,
Jernej Barbic
,
Satyandra K.Gupta
PDF
Cite
DOI
Toolpath Generation for Robot Filleting
Filleting is a finishing process of rounding off the edge to blunt the sharpness as well as to improve the component’s durability …
Srinivasan Lakshminarayanan
,
Omey Mohan Manyar
,
Domenico Campolo
PDF
Cite
Cite
×