Real-to-Sim Parameter Learning for Deformable Packages Using High-Fidelity Simulators for Robotic Manipulation
Abstract
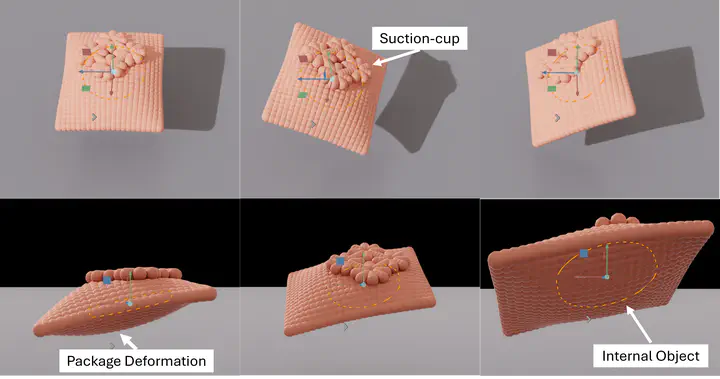
Deformable packages are becoming increasingly prevalent in the logistics and warehouse industry, demanding robotic manipulation strategies that are robust and adaptive. Unlike rigid objects, these packages undergo significant shape changes under external forces, making their handling more complex. These deformable packages are often manipulated using suction cups and contain internal objects that shift during transport, introducing additional complexity. To ensure safe and efficient robotic manipulation at scale, high-fidelity simulation is crucial to support automated robot trajectory generation. In this work, we present a physics-driven simulation framework that accurately models multi-object deformable packages, capturing package deformations, suction-cup interactions, and internal object dynamics. Our approach employs a hyperelastic model to accurately simulate package-object interactions, including contact forces, suction-cup interactions, friction, and material deformation. By leveraging high-fidelity physics, we optimize simulation parameters using real-world trajectory and package deformation data, ensuring an accurate representation of package behavior. Running in real-time, our framework reduces real-to-sim discrepancies, making it viable for real-world deployment. Additionally, we develop a parallelized simulation environment for large-scale reinforcement learning and trajectory optimization, paving the way for scalable, efficient, and adaptable robotic manipulation of deformable packages in diverse warehouse settings.
Omey Mohan Manyar
Ph.D. Student in Robotics
Interested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.