A Simulation-Based Grasp Planner for Enabling Robotic Grasping during Composite Sheet Layup
Abstract
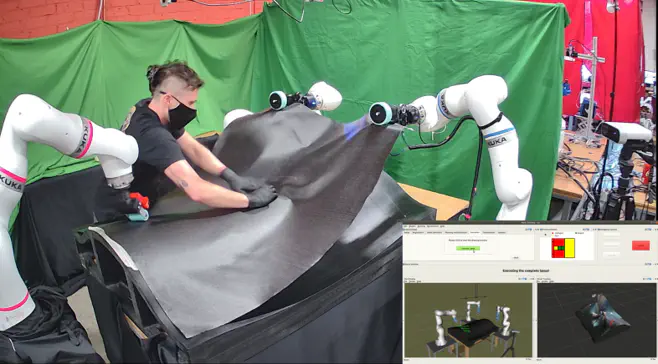
Composites are increasingly becoming a material of choice in the aerospace and automotive industries. Currently, many composite parts are produced by manually laying up sheets on complex molds. Composite sheet layup requires executing two main tasks (1) grasping a sheet and (2) draping it on the mold. Automating the layup process requires automation of these two tasks. This paper is focused on the automation of the grasping task using robots. This requires an automated generation of grasp plans to enable robots to hold the sheet during the draping process. We present a simulation-based approach for determining robot grasp locations on the composite sheets. We also present an intervention controller that uses a real-time sheet tracking system during plan execution and can prevent failures. We demonstrate the performance of the developed system using a large complex part.
Omey Mohan Manyar
Ph.D. Student in Robotics
Interested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.