Inverse Reinforcement Learning Framework for Transferring Task Sequencing Policies from Humans to Robots in Manufacturing Applications
Abstract
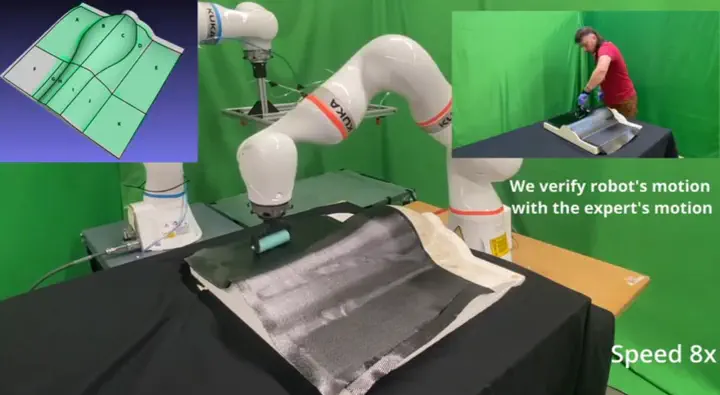
In this work, we present an inverse reinforcement learning approach for solving the problem of task sequencing for robots in complex manufacturing processes. Our proposed framework is adaptable to variations in process and can perform sequencing for completely new parts. We prescribe an approach to capture feature interactions in a demonstration dataset based on a metric that computes feature interaction coverage. We then actively learn the expert’s policy by keeping the expert in the loop. Our training and testing results reveal that our model can successfully learn the expert’s policy. We demonstrate the performance of our method on a real-world manufacturing application where we transfer the policy for task sequencing to a manipulator. Our experiments show that the robot can perform these tasks to produce human-competitive performance. Code and video can be found at:https://sites.google.com/usc.edu/irlfortasksequencing
Omey Mohan Manyar
Ph.D. Student in Robotics
Interested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.