Abstract
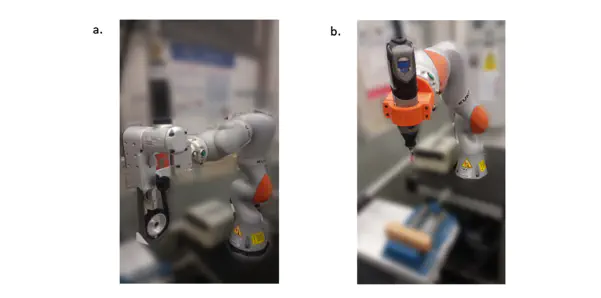
Filleting is a finishing process of rounding off the edge to blunt the sharpness as well as to improve the component’s durability by distributing the stress concentration over a larger area, thus enabling the filleted component to last long. Though the filleting process is widespread in manufacturing industry due to its effectiveness, the operation requires subtle changes in position and orientation of the tool when machining the work-piece which is very difficult to capture `algorithmically’ and thus predominantly carried out by skilled manual workers as the generation of the toolpath for the process is a major challenge. In this paper, we propose a novel strategy based on Lissajous curves to generate the required toolpath for filleting. Based on the starting and ending location of the fillet, we conceptualize a Lissajous pattern in 2D space. Through a mathematical relationship between the 2D space and the 3D real-world, a toolpath comprising both position and orientation is determined. Trials on Wooden and Aluminium work coupons using KUKA iiwa R800 robot validate our strategy to obtain the desired geometrical profile.
Omey Mohan Manyar
Ph.D. Student in Robotics
Interested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.