Visual servo-based trajectory planning for fast and accurate sheet pick and place operations
Abstract
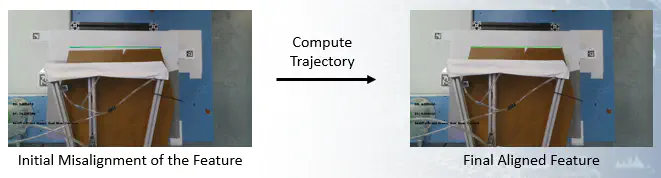
In industry, several operations require sheet-like materials to be transported from a loading station to the desired location. Such applications are prevalent in the aerospace and textile industry where composite prepreg sheets or fabrics are placed over a tool or fed to a machine. Using robots for sheet transport operations offers a flexible solution for such highly complex tasks. To create high-quality parts, sheets need to be accurately placed at the correct location. This paper presents automated trajectory planning and control algorithms for a robot to pick up sheets from the input station using suction grippers and, transport and place them over the tool surface. Machine vision is used at the pick location for estimating the sheet pose. Unfortunately, pick-up accuracy is not sufficiently high due to sheet movement during suction-based grasping and localization errors. We employ ideas inspired by visual servo techniques to accurately place the sheet on the tool. Our method uses an Eye-to-Hand camera configuration to align the desired image features with the reference markings on the tool. We introduce a sampling-based Jacobian estimation scheme that can reliably achieve the desired accuracy while minimizing the operation time. Experiments are performed to validate our methodology and compute the placement accuracy on an industrial tool.
Omey Mohan Manyar
Ph.D. Student in Robotics
Interested in the work I do? Feel free to reach out with any questions you might have at manyar@usc.edu.